2019-计算机组织与结构-lecture08
Cache
- 在存储层次中位于主存之上
1. 为什么使用Cache
- 内存墙的存在
1.1. 解决内存墙的方法
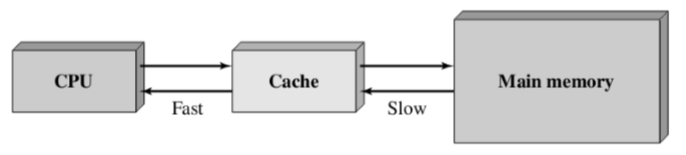
- Use a smaller, faster cache memory block together with a relatively large and slow main block(同时使用更小,更快的cache存储块和相对比较大,比较慢的存储块)
- The cache contains a copy of portions of main memory(cache是主存中数据的部分拷贝)
- Located between CPU and memory, and may be integrated inside CPU or as a module on motherboard(位于CPU和内存之间,可以集成在CPU内部或作为主板上的模块)
- 前提:如何保证fast和Slow是平衡的?
- 在Fast的路段上快速重复进行访问来寻找需要的相应数据。
- Cache是Main memory之中的拷贝,而不是崭新的。而且只包含了一部分。
1.2. Cache的运行流程
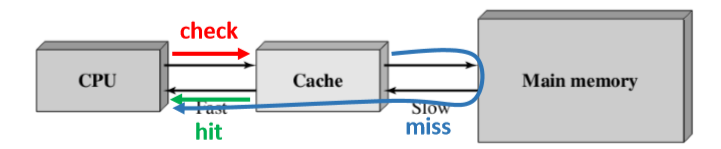
- check: 当处理器尝试读取数据的时候,CPU首先确认数据是否在Cache中。when the processor attempts to read a word of memory, a check is made to determine if the word is in the cache
- Hit:找到数据,即命中,将数据传送到Cache中去。if so, the word is delivered to the processor
- Miss:没找到,首先从主存中将块加载到Cache中,然后从Cache中传递给处理器。if not, a block of main memory, consisting of some fixed number of words, is read into the cache and then the word is delivered to the processor
- 特殊的是:在Miss的时候,从主存中取出来包含CPU需要的字在内的一个数据块来给Cache,之后从Cache中读取相应目标字。(注意不是直接取出来的)
- 如何判断是否找到?
- 也就是将cache中的每一行的tag和目标地址的tag进行比较,如果有相同的即为命中。
1.3. 关于上述过程的一些问题
1.3.1. 如何确定一个东西是否在Cache里面呢?
- The von Neumann machine design(冯诺依曼机器结构)
- The contents of this memory are addressable by location, without regard to the type of data contained there 无论什么数据都是以相同的方式被寻址
- Cache includes tags to identify its content’s corresponding locations in main memory(Cache包含一个Tag来确认这一行内容对应主存的哪一部分)
- 因为内存中的数据是由标签来进行指向的,而不是按照数据的类型进行访问。
1.3.2. 为什么不直接把字搬过去,而是搬一个块?
- 因为Principle of Locality(局部性原理)
- locality of reference,就是在程序执行的过程中,处理器更倾向于成簇(块)地访问存储器中的指令和数据。a phenomenon describing the same value, or related storage locations, being frequently accessed (Wikipedia)
- Types
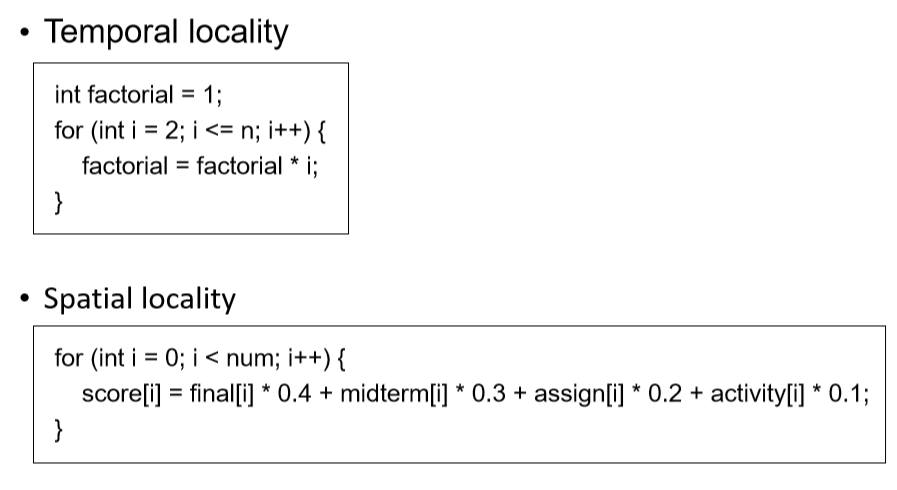
- Temporal locality(时间的局部性): the reuse of specific data, and/or resources, within a relatively small time duration(在相对较短的时间内重用特定的数据或资源)
- Spatial locality(空间的局部性): the use of data elements within relatively close storage locations(在相对较短的空间内重读使用特定数据或者资源)
- Sequential locality: a special case of spatial locality, occurs when data elements are arranged and accessed linearly, such as, traversing the elements in a one-dimensional array(空间局部性的一种特殊情况是,当数据元素以线性方式排列和访问时,例如遍历一维数组中的元素)
- 一般是按照顺序进行存储,我们按照序列来存储。在时间上和空间上是附近稳定的。
一些例子
空间的局部性
- Use “temporal locality”(使用局部性原理)
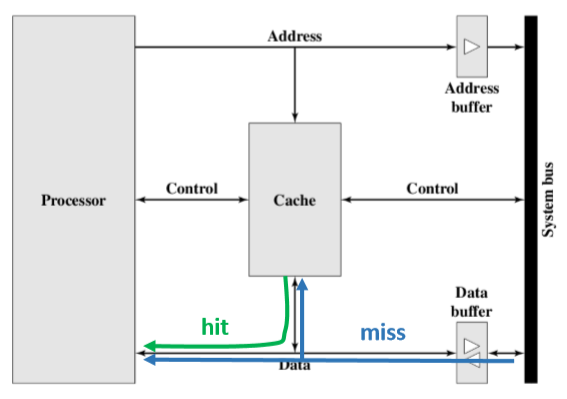
- Typical cache organization(常规的cache组织)
移动块状结构
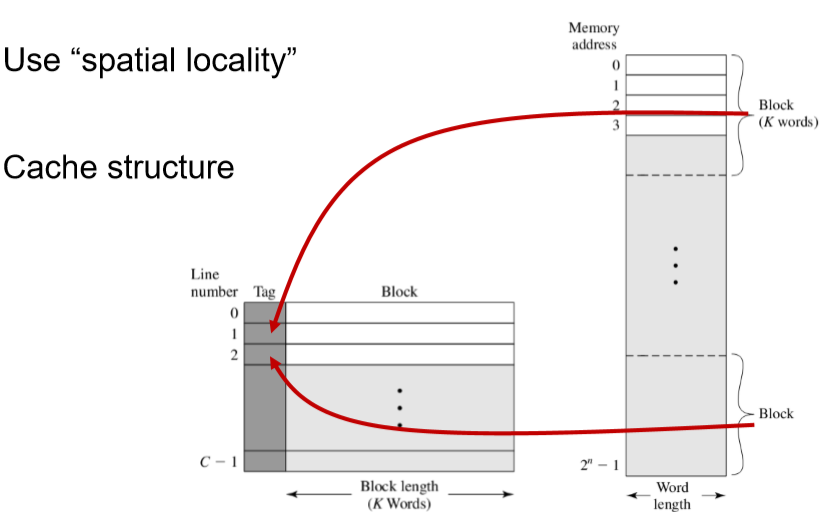
- 按照块来进行表示,在Cache中用Tag记录每一个块的快号,而并不是具体的地址。
1.3.3. 为什么cache能节省时间?
- 搬一个块的时间,要比一次一次搬块内每个单元的时间要快。
- 找一个地址的时间为t0,那么计算易得会少。
- 程序访问的局部性原理决定了我们命中的概率很高。
平均访问时间
- Assume 𝑝 is hit rate, 𝑇𝐶 is access time of cache, 𝑇𝑀 is access time of main memory, the average access time when using cache is
- 𝑇𝐴 = 𝑝 × 𝑇𝐶 +(1 − 𝑝)× (𝑇𝐶 + 𝑇𝑀) = 𝑇𝐶 + (1 − 𝑝) × 𝑇𝑀
- 𝑇𝑀 是从主存中读取的时间,𝑇𝐶是从Cache中读取的时间。
- 那么我们想要p变大或者𝑇𝐶更小。
- If we want 𝑇𝐴 < 𝑇𝑀, it is required 𝑝 > 𝑇𝐶 / 𝑇𝑀
- 一步一步往上加,因为有的概率的计算时困难的。
- 前提:程序访问不是随机的,是由局部性的。
- 困难: the capacity of cache is much smaller than the capacity of memory(Cache的容量远远小于主存的容量)
2. 如何设计一个Cache
2.1. 影响因素
- Cache size cache大小
- Mapping function 映射函数
- Replacement algorithm 替换策略
- Write policy 写策略
- Line size:块的大小
- Number of caches 高速缓存器的个数
2.2. Cache Size
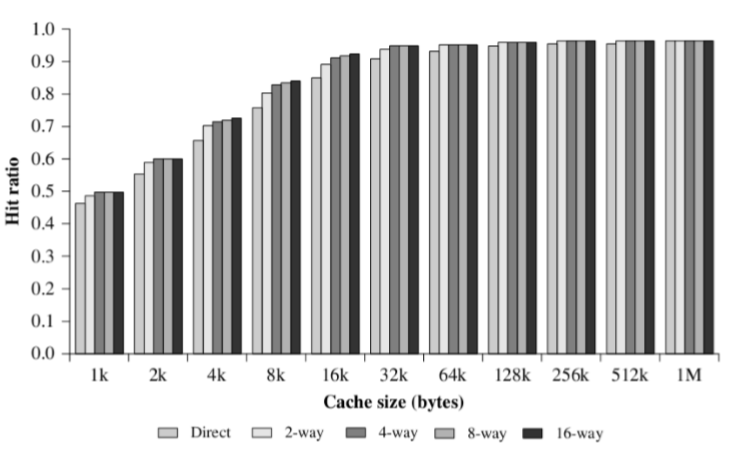
- Increasing cache size will:
- Increases hit rate 𝑝
- Increases cost and access time of cache 𝑇𝐶
- 有可能会增加查找cache的时间,取决于你寻找的块的可能地址。
- 为什么随着块的增大,p会放缓,因为过大就不满足局部性原理了。
- 行数过大也没有相应的用处了。
2.3. 放置策略
- An algorithm used to map main memory blocks into cache lines(一种用来把主存中的存储块映射到cache行的算法)
- A method is needed for determining which main memory block currently occupies a cache line(一种决定覆盖哪一行cache的方法)
- The choice of the mapping function dictates how the cache is organized(映射策略的选择决定了Cache是如何组织)
- Types
- Direct mapping 直接映射
- Associative mapping 全相联映射
- Set associative mapping 组相联映射
- 解决的问题:把主存中的存储映射到cache中去。
- 不同策略会影响什么:一个块进入cache的位置。
2.3.1. cache和主存的结构以及对应
- cache
- 一行:tag + 行 + 字
- 一共有m个块,也就是m行
- tag是主存储器中的一部分,用来识别当前储存的是哪一块。
- 主存中:字长,每一块(K字)
2.3.2. Direct Mapping(直接映射)
- Map each block of main memory into only one possible cache line
- 前几个块放在一行。
- 之后几个块放在一行。
- 之后往下循环下去到底。
- Assume 𝑖 is cache line number, 𝑗 is main memory block number, 𝐶 is number of lines in cache 𝑖 = 𝑗 𝑚𝑜𝑑 𝐶
- 这个策略保证每一行的附近都是均衡的
- 性能会比上一个好
- 为什么第二个方法会比第一个方法好?
- 因为第一个很有可能造成反复Miss:比如在两个块的边缘
- 保证相邻的块可以被同时载入Cache中。

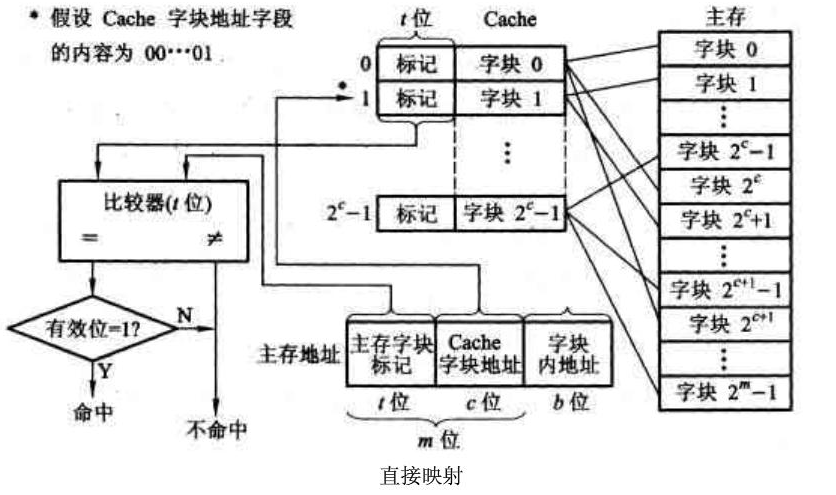
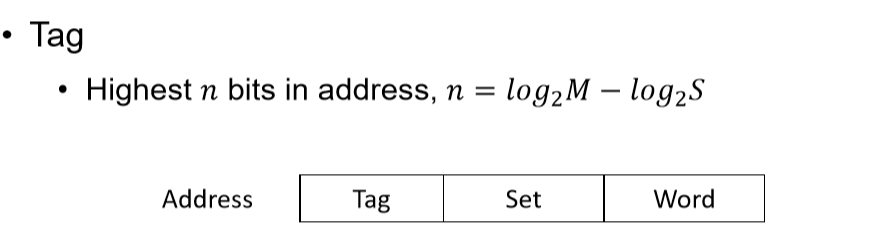
- Tag:标记,是主存储器地址中的一个。
- Highest 𝑛 bits in address, 𝑛 = 𝑙𝑜𝑔2𝑀 − 𝑙𝑜𝑔2𝐶

- 为了成本,要用尽可能少的位置存储tag
- 常见的形式:前面表示块号,后面表示块内地址(4个2位,2个1位)
- 块越大,块内地址位数越多,块号地址越少,块越少。
- 因为块号和块内地址的二进制长度一定
- 那么 i = j mod c ,比如 c = 16,块号的最后四位就决定了它的行(而这是不需要存的)。根据块号的最后四位来寻找哪些行,我们只要比对块号其余部分中的 tag 和 Cache 中即可,如果相同,则Hit,如果不同,我们根据块号到 Main memory 中寻找到相应的块,将其加载到 Cache 中,然后覆盖新的tag。
- 取模决定哪一行(相当于分离出来line这些列)
- Example
- Assume cache has 4 lines, each line contains 8 words, and main memory contains 128 words. To access main memory, the length of address is 7 bits. The lowest 3 bits determines which word in the block, the middle 2 bits determines which line is possible, and the highest 2 bits determines which block occupies the cache 假设cache有4行,每行有8个字,主存有128个字。为了访问内存,至少需要7位地址,第三位决定块内地址,中间两位确定cache中对应映射的行,最高位是Tag(标记位)
- 好处:
- 比较方便查找
- 很快的查找,check。
- 缺点:
- 两个块被重复使用的话有可能出现抖动的现象。(命中率低)
- 比较适合大容量的cache
- 直接映射在cache中只能对应一行,而不能对应多个。
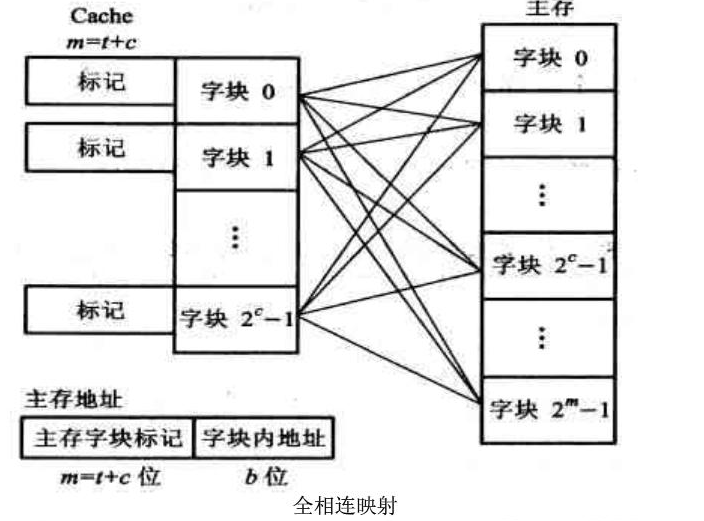
2.4. 全关联映射
- 直接映射就是固定一行,那么关联映射是主存中的可以放置在cache中的任意一行。
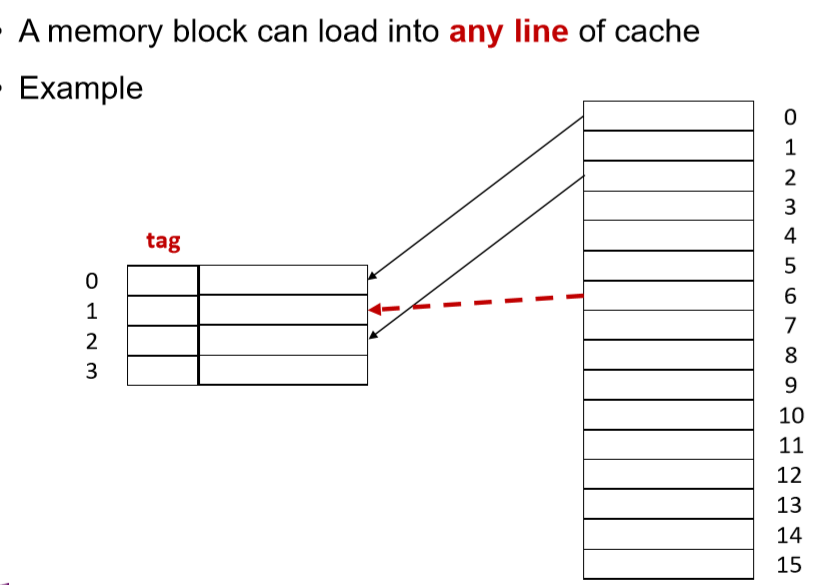
- 必须存储完成的块号而不能进行相应的修正。
- Eg. Assume cache has 4 lines, each line contains 8 words, and main memory contains 128 words. To access main memory, the length of address is 7 bits. The lowest 3 bits determines which word in the block, and the highest 4 bits determines which block occupies the cache
- cache行数不可能被任意一个东西决定,而是省下来的所有的信息来进行决定。
2.4.1. 全关联映射的 cache
- 此时的cache的tag是由 tag + word组成
2.4.2. 全关联映射的特点
- 优点:
- 避免了抖动现象:Avoid thrashing
- 缺点:
- 需要一块小硬件来遍历 cache 的每一个块号。
- Complicated implementation(复杂的实现)
- Cache search is expensive, i.e. require to access each line of cache in checking(Cache的查找是高消耗的,需要检查Cache的每一行)
- 比较适合小容量的Cache
- 小容量的Cache的遍历比较快
- 在小容量的时候使用直接映射的抖动问题明显
2.5. 组相联映射
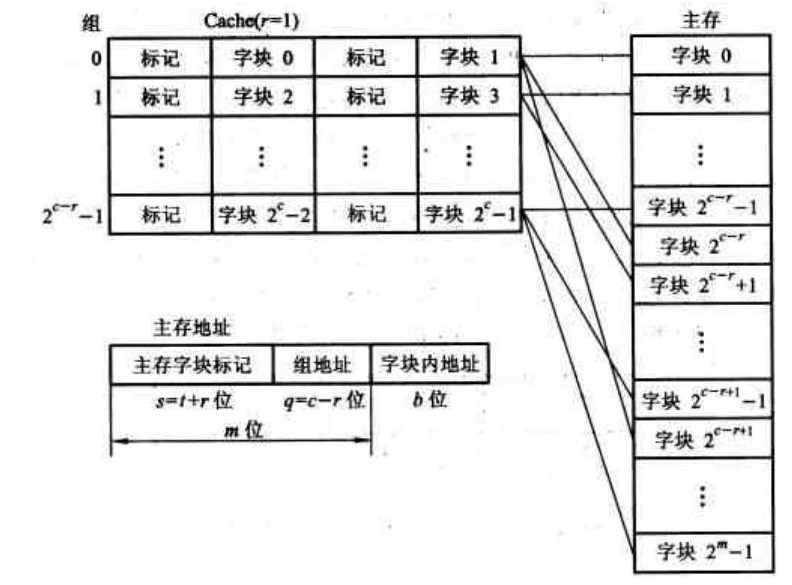
- 首先分组(类似直接映射),然后把每一个块映射到哪一组内确定哪一行(类似关联映射)
- Cache is divided into a number of sets, each set contains a number of lines, and a given block maps to any line in a given set(Cache被划分一组组,每一组包含一定数量的行,并且每一个块被映射到指定的一组中)
- Assume 𝑠 is set number, 𝑗 is main memory block number, 𝑆 is number of sets in cache 𝑠 = 𝑗 𝑚𝑜𝑑 𝑆
- 用块号对组数取模,组数是比较大的。
- K-way set
- 𝐾 = C/S
- K路:每一组中行的个数,一般是比较小的数字。
- Eg.八行分为四组,是二路组
- 组内策略是未必是随机的。
2.5.1. Cache结构
-
Eg.Assume cache has 4 lines which are divided into 2-way set, each line contains 8 words, and main memory contains 128 words. To access main memory, the length of address is 7 bits. The lowest 3 bits determines which word in the block, the middle 1 bit determines which set in the cache, and the highest 3 bits determines which block occupies the cache
-
因为是4组,2路组,所以我们使用log2(组数)来,我们根据组数来确定。
2.5.2. 特点
- 组相联映射兼具直接映射和关联映射的特点。
- Advantages
- Combine the advantages of direct mapping and associate mapping(结合直接映射和全相联映射的优点)
- Disadvantages
- Combine the disadvantages of direct mapping and associate mapping(结合直接映射和全相联映射的缺点)
- Make a good trade-off for arbitrary capacity cache(对任意容量缓存进行良好的折衷)
- 在组关联映射和全关联映射中,替换策略不同的情况下可能导致时间不同
2.5.3. 和直接映射和关联映射的特点
- K=1,则为直接映射
- K=C,则为关联映射
2.6. 关联性(自由度)
- 是指一个块的可以被放置在的位置的数字。number of possible cache lines for each block in main memory
- 直接映射:1
- 关联映射:C
- 主关联映射:K
2.6.1. 特点
- 关联性越小,命中率越低。 The lower correlation is, the lower hit rate is
- Direct mapping is the lowest in hit rate, and the associative mapping is the highest(直接映射的命中率是最低的,组相联映射的命中率是最高的)
- 关联性越小,check时间越少。The lower correlation is, the quicker checking is
- Direct mapping has the least check time, and associative has the most check time(直接映射的检查耗时最短,全相联映射的检查耗时最长)
- 关联性越低,tag越短,The lower correlation is, the shorter tag is
- Direct mapping is the shortest tag, and the associative mapping is the longest tag(直接映射的Tag最短,全相联映射的Tag最长)
2.7. cache的相应图片解释
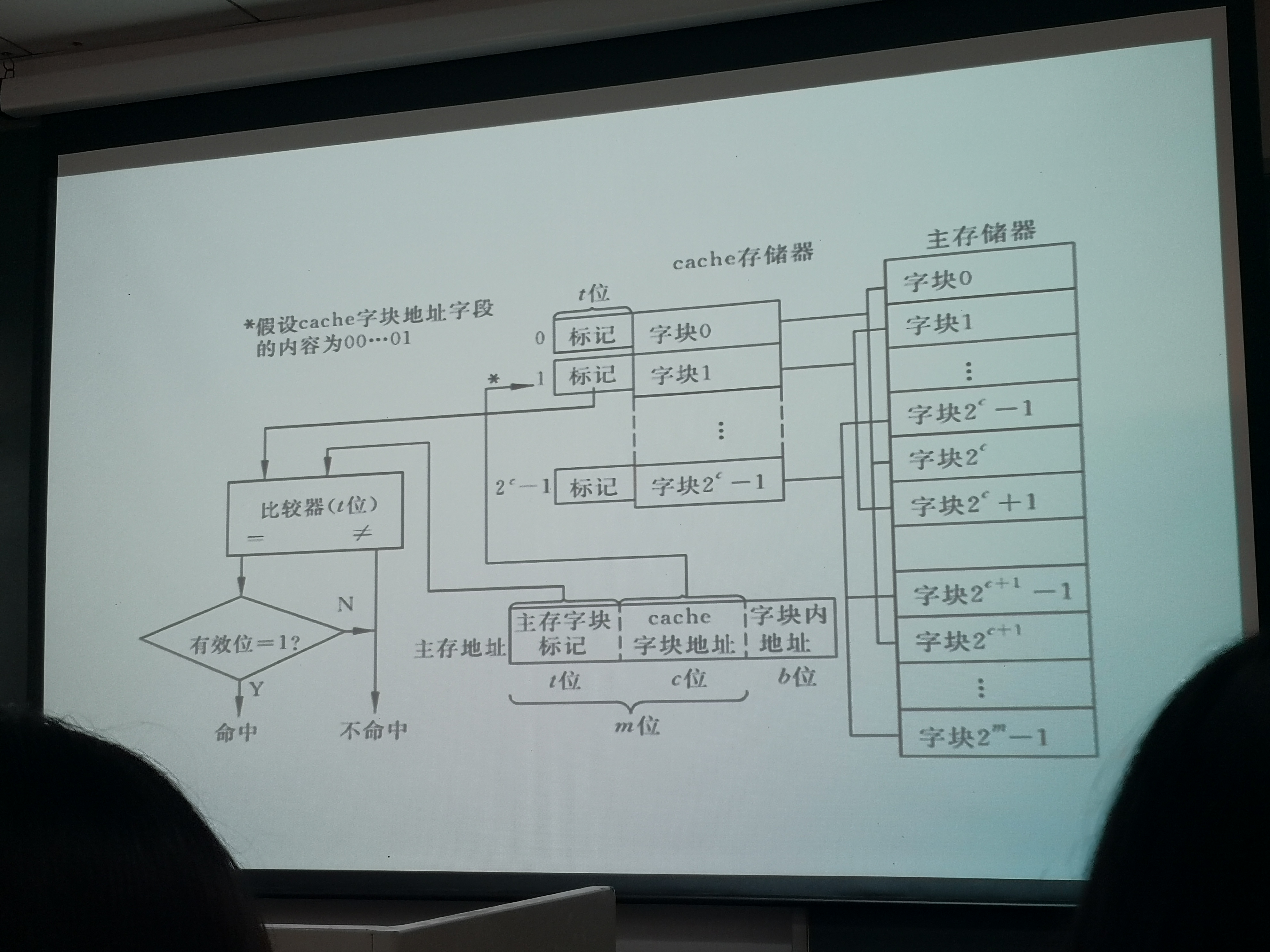
- 直接映射:先把中间c位数据取出来,决定需要对比的行号,然后选中cache中的一行,然后我们在此取出前t位,然后进入比较器进行比较,如果相同即为命中。
- 关联映射:传来m位的标记,此时我们需要将目标和cache的每一行的tag进行比较直到最后。
- 如果相同即为Hit
- 如果到最后仍然没有相同,那么结果则为Miss
- 整体来说,首先从主存中确定出Cache地址,然后确定tag是否命中,存储中一个存储tag,一个存储数据
3. 替换算法
- 替换的目标是:我们替换的是被用到可能性最低的块。
- Once the cache has been filled, when a new block is brought into the cache, one of the existing blocks must be replaced(一旦缓存被填满,当一个新的块被带入缓存时,必须替换现有块中的一个。)
- For direct mapping, there is only one possible line for any particular block, and no choice is possible(直接映射对于每一块只有确定一行,没有别的可能性)
- For the associative and set-associative mappings, a replacement algorithm is needed, which must be implemented in hardware(对于全相联映射和组相联映射,需要实现在硬件层面的替换算法)
3.1. 替换算法的具体类型
- Least Recently Used (LRU)
- First In First Out (FIFO)
- Least Frequently Used (LFU)
- Random(随机替换)
3.1.1. Least Recently Used (LRU) 最近最少用
- 根据最近一次被用到的时间来进行排序
- 但是我们不能在一个Cache里面进行排序。
- 以下以二路组为例:如果我们一行被用则我们将一位置为1,然后我们另外一路置为0。
- Replace a set of blocks in cache having the longest time of having no references to it(替换目前Cache中最长时间没有被用到一块)
- Assumption: more recently used memory locations are more likely to be referenced(假设最近被用到的块更加可能被再次用到)
- Implementation for two-way set associative mapping(对于二路组组相联映射的实现)
- Each line includes a USE bit(每一行使用一个USE位)
- When a line is referenced, its USE bit is set to 1 and the USE bit of the other line in that set is set to 0(对于二路组,必然一个为1,而另一个为0)
- When a block is to be read into the set, the line whose USE bit is 0 is used(当一个块需要被写入这个组的时候,写入USE位为0的哪一行)
3.1.2. First In First Out (FIFO) 先进先出
- 和使用时间没有关系,而是根据进入的时间来进行排序。
- Replace the set of blocks in cache that has been in the cache for the longest time(替换进入到Cache时间最长的一行)
- Assumption: later used memory locations are more likely to be referenced(建设越靠后使用的内存数据更加可能被再次使用)
- Implementation: round-robin or circular buffer technique(实现:循环或循环缓冲技术)
- 四路组的时间:我们只需要一个轮询器即可,从第一个轮询到第二个。
3.1.3. Least Frequently Used (LFU)最不经常用
- 根据我们在过去的一段时间中被使用的次数。
- Replace the set of blocks having the least number of references(替换Cache中使用次数最少的部分)
- Assumption: more frequently used memory locations are more likely to be referenced(假设:使用次数多的部分更可能被再次使用)
- Implementation: associate a counter with each line(使用一个计数器来实现)
- 和LRU不同:这个是根据次数,而另一个是根据时间。
3.1.4. Random
- Replace that block in cache or the set randomly(随机替换Cache中一行)
- Assumption: each memory location is similar to be referenced(假设:每一行被调用的可能性是均等的)
- Implementation: randomly replace(实现:随机替换)
- random replacement provides only slightly inferior performance to an algorithm based on usage(随机替换只提供比基于使用情况的算法稍差的性能)
- 随机命中在实验中也体现出了很好的性能。
3.1.5. 计算命中率
- 首先计算相应部分的数据存储到了哪一块。
- 这个务必要算清,保证可以确定是都命中。
- 一开始cache中没有数据块的时候,必然Miss,然后加载相应模块
3.2. 写机制
- 在被替换前要被写回去,没有被修改无所谓是否被写回去。
- Consistency between memory and cache(内存和Cache之间的一致性)
- When a block in cache is being replaced, it should consider whether the block has been altered(当块被替换回去的时候,我们应当考虑记录下这个块是否被替换过)
- Two cases(两种情况)
- If not altered, it may be overwritten with a new block without any other operation(如果没有被替换过,直接在这里重写崭新的块即可)
- If altered, the block in main memory must be updated before replacement(如果这一块被替换,那么主存应该在替换前更新里面对应的块的数据)
- Policy
- Write through(直写)
- Write back(回写)
3.2.1. 写入操作
- 一旦有写操作,那么要尽快把Cache中的数据写回到内存。
- 在某些机器中,多个CPU可能会访问同时间访问一块内存,那么如果不同步会出现问题。
- 在某些IO模块中,可以通过特定的硬件来访问内存直接进行修改
3.2.2. 写回操作
- 我们只有在一个块被写回的时候,我们才进行写回操作。
- 我们使用了脏位来进行判断,如果脏位为1,则进行更新。
- Updates are made only in the cache, and when a block is replaced, it is written back to main memory if and only if it is altered(更新只会发生在Cache中,让块被替换的时候才会写回主存)
- Use a dirty bit, or use bit, to represent whether a block is altered( 使用一个脏位或者USE位来表示这个块的数据已经被修改过了 )
- Advantage
- Minimizes memory writes(最小化内存的写入)
- Disadvantages
- Portions of main memory are outdated, and hence accesses by I/O modules can be allowed only through the cache, which makes for complex circuitry and a potential bottleneck(部分主存已过时,因此I/O模块只能通过高速缓存进行访问,这会造成复杂的电路和潜在的瓶颈)
3.3. 行大小
- 假设前提:我们认为Cache的整个的大小已经确定的时候
- 结论:Cache的行大小增加,命中率会先升高再降低
- 利用了空间的局部性,行在一定程度内增加,会提高命中率。
- 之后行长度过长的时候,不满足空间的局部性,同时行数会变少,出现抖动现象,降低命中率。
- As the line size increases from very small to larger(当行的长度从很小逐渐变大的过程中)
- Hit ratio increases(命中率提高)
- More useful data can be brought into the cache(更多有用的数据被加载到cache中)
- Hit ratio increases(命中率提高)
- As the line becomes even larger(当行大小进一步变大)
- Hit ratio decreases(命中率降低)
- Larger blocks reduce the number of lines in a cache, which leads to frequent replacement of lines(更大的块减少了cache中的行数,导致了某些行的经常性替换(抖动))
- Each additional word is farther from the requested word and therefore less likely to be needed in the near future(每一个附加单词都离请求的单词较远,因此在不久的将来不太可能需要)
- Hit ratio decreases(命中率降低)
- The relationship between block size and hit ratio is complex(块大小和命中率之间的关系是复杂的)
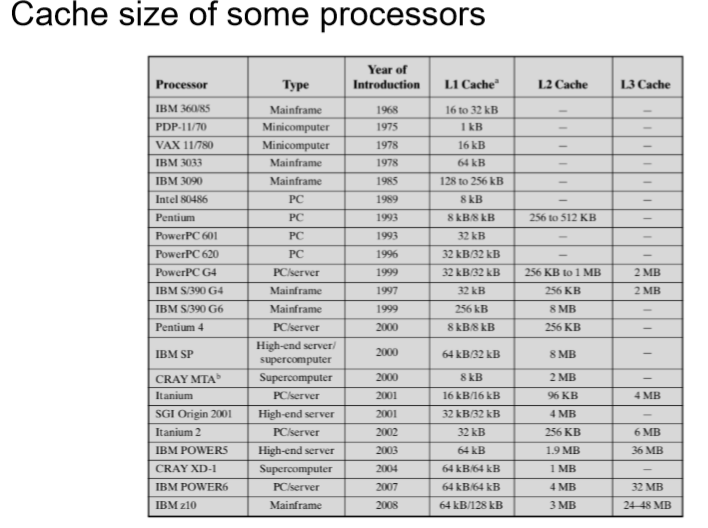
4. Cache的块数
- Single or two level(单个或者两个层级)
- Single(一个)
- Integrates a cache on the same chip as the processor(在与处理器相同的芯片上集成缓存)
- Reduces external bus activity and speeds up execution(减少了外部总线的使用频率并且加快了处理的速度)
- Two level
- Reduces the processor’s access of DRAM or ROM memory across the bus when L1 misses(减少了处理器在L1为命中时通过总线对于DRAM和ROM存储器)
- Uses a separate data path instead of system bus for transferring data between the L2 cache and the processor(使用了被隔离开的数据通道而不是总线来再L2和处理器之间处理信息)
- Some processors incorporate L2 cache on processor chip(一些处理器把L2缓存器集成在处理器芯片上)
- Single(一个)
- 目前一般是三级Cache
- 整体排列形式:横向排列为(C1,C2,C3),大小:C3>C2>C1
- 访问形式:类似Cache和主存的关系。
- 记住要搬运这一块。
- Unified or split(统一或者分割)
- Unified(统一)
- Higher hit rate for automatic balancing of load between instruction and data(提高指令与数据负载自动平衡的命中率)
- Only one cache is needed to be designed and implemented(只有一个cache需要被设计和实现)
- Split(分隔)
- Eliminate contention for the cache between the instruction fetch/decode unit and the execution unit, which is important to the pipelining of instructions(消除指令获取/解码单元和执行单元之间对缓存的争用,这对指令的流水线很重要)
- Unified(统一)
4.1. 计算平均访问时间
- 我们假设第一级的访问时间为T1,第二季访问时间T2,第三级访问时间为T3,访问主存的时间为TTM。第一级命中概率为P1,一二级联合命中率为P2,一二三级联合命中率为P3。
- TA = T1 +(1-P1)T2+(1-P2)T3+(1-P3TM
- 计算技巧:一步一步进行计算,第一级肯定有,然后一级级进行计算。
2019-计算机组织与结构-lecture08
https://spricoder.github.io/2020/01/16/2019-COA19/2019-COA19-lecture08/